|
Simple Machines
The classic six Simple Machines
LEVER - WEDGE - PULLY - SCREW
"Give me a lever long enough The simple machine Archimedes would have been referring to in that quote above of the great man is of course the Lever.
Granted the lever would have to be longer than the diameter of the earth's orbit probably, and a place to stand would have been well in outer space! But let's not be picky.
The simplest machines in general terms can be defined, or specified as the simplest of devices or mechanisms that apply the law of leverage (mechanical advantage) to convert or multiply the input force, to change the direction or magnitude of the output force.
Simple machine make use of a singular applied force (input) to operate against a single applied load (output). Simplifying and ignoring any frictional losses, simply put - the work done on the load (the output) is equal to the work done by the applied force (the input).
This Mechanical Advantage can be used to increase the amount of the output force, at the cost of a proportional decrease in the distance moved by the load. The ratio of the output to the input force is called the mechanical advantage.
Usually the term refers to the six classical simple machines which were defined by Renaissance scientists. But more often than not in recent times, machines made up from combinations of the six basic simple machines are also included. That's progress for ya!
The six simple (classic) machines are; They are the elementary "building blocks" of which all complicated machines are composed. For example, wheels, levers, and pulleys are all used in the mechanism of a bicycle.
In the 20th century, a realization that at least one machine, the hydraulic press, had been left out of the simple category and arguments that some of the six classical devices can be considered as modifications of others, has led some modern sources to avoid specifying any list of simple devices as "basic".
Nevertheless, the above six are what is usually meant by "simple machines" and are still regarded as the foundation of mechanical technology, although the only reason for preferring this list to others is tradition.
The most basic of machines fall into two classes; those dependent on the vector resolution of forces (inclined plane, wedge, screw) and those in which there is an equilibrium of torques (lever, pulley, wheel).
A bit of basic machine history:
He studied the "Archimedean" simple type machines, this was the lever, pulley and screw, the Archimedes screw named after him of course. He discovered the principles of a mechanical advantage using the lever.
The findings of his understandings were limited to the static balance of forces. As such did not involve the (now obvious) trade-off between force and distance moved.
Heron of Alexandria (ca. 10–75 AD) lists five mechanisms with which a load can be set in motion in his work Mechanics. These were: winch, lever, pulley, wedge, and screw.
During the Renaissance period, the classic five basic machines (excluding the wedge) began to be studied as a group. However, the complete dynamic theory (we know today) of simple machines was worked out by Italian scientist Galileo Galilei, in 1600 in Le Mecca-niche ("On Mechanics").
Galileo Galilei, (born 15 February 1564 to 8 January 1642) was a Tuscan Italian physicist, mathematician, astronomer, and philosopher who played a major role in the scientific revolution.
He was the first to grasp the concept that simple/basic machines do not create energy, only transform it. But none the less could actually amplify the input energy to achieve 'movement on a larger load than would otherwise be possible. Simple machines were all being used commonly for hundreds of years even before Leonardo De Vinci's time. The classification theory is that each machine makes work easier by utilizing some kind of trade-off between the input force applied and the output distance over which the input force is applied.
The lever is a length of bar or rod that see-saws around a pivot point. Downward force at one end causes an upward force at the other end of the lever. By moving where the pivot point is located along the length of the lever, the lever can either multiply the force or the motion applied depending on whether the force is applied to the long end or the shorter end respectively.
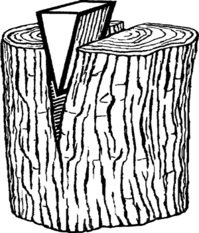
A wedge creates a splitting action converting forward motion in one direction into a left and right splitting motion acting at right angles to the blade. Virtually all simple machines using the wedge will be cutting type machines. One exception would be a lifting machine, that would use a wedge to get under a load and use the split in a vertical lifting motion.
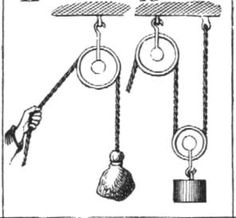
A single pulley will only reverse the direction of a force but the output force will still equal the input force, ignoring losses. When two or more pulleys are connected together as a single unit, they permit a heavy load to be lifted with less force. The trade-off here is that the length the end of the rope has to move is a much greater distance than the load is lifted.
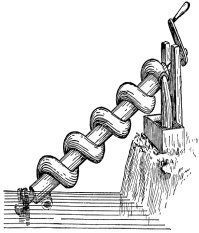
In turning a screw converts a rotary circular motion into a forward or backward motion along the axis of the rotation. A screw is a central cylindrical core with a thread or groove wrapped around it forming a helix. The Screw could be thought of as a compact wedge if you prefer. A very good example is the Archimedes screw used like a pump to lift water for irrigation as one of the simple machines. But also today, driven by water to produce power as a not so simple machine.
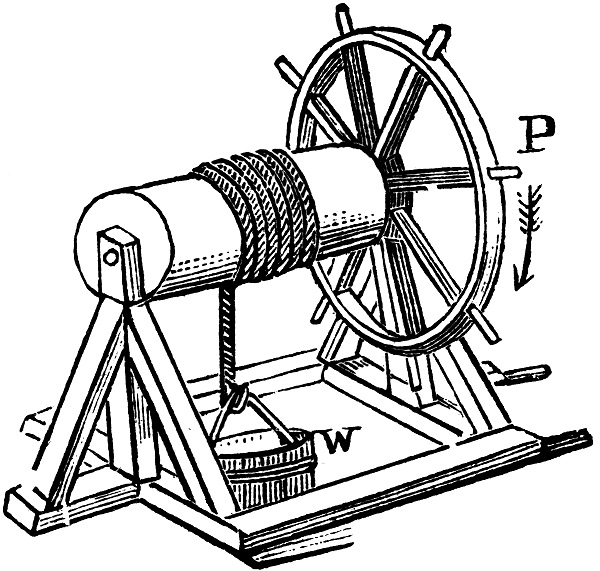
With the wheel and axle machine, a wheel or spoke is locked to a central axle so that when one is turned the other must turn. A longer motion at the edge of the wheel is converted to a shorter more powerful motion at the axle. In reverse, a short powerful force at the axle will move the wheel's edge a greater distance.
The inclined plane is the last of the six original simple machines. As its name would suggest, typically it's a flat surface with the endpoints at different heights.
The mechanical advantage is realized by raising an object up by moving it along an inclined plane rather than directly vertical. The highest amount of force required is thus reduced, not without a cost of course.
The cost is increasing the distance the object must travel. The mechanical advantage of an inclined plane therefore, is the ratio of the length of the sloped surface to the height it spans.
The same amount of mechanical energy will be required to lift an object by a specified height, ignoring losses from friction. But the inclined plane gives us the advantage to do the same work but with a smaller maximum force exerted over an increased distance.
Go back to the Machine 'In the box' page.
Go onwards to 'Machine Shop Information' page.
Return from Simple Machines to Home page.
PLEASE feel free to use this button and donate You Are Secure!
so Machine-Information-Systems.Com can keep helping you.
|